


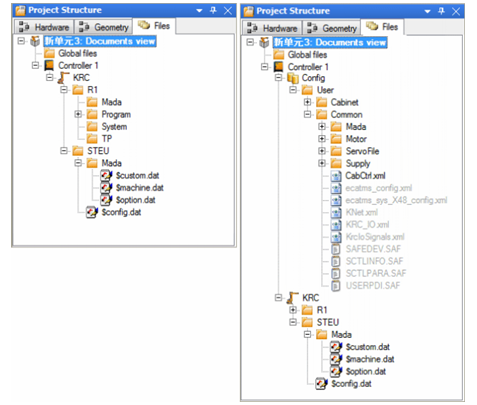
在将一个项目传输到机器人控制系统时,总是先生成代码。 以此步骤可单独 生成代码,这样可事先检验生成过程是否无错。 代码在窗口项目结构的选项卡文件中显示。 自动生成的代码显示为浅灰色
配置中的所有更改在生成代码期间才被应用到文件结构中。出于这个 原因,代码生成后文件中的手动更改可能不再存在。
操作步骤:
选择菜单序列其它 > 生成代码。 代码即生成。当过程结束时,信息窗口中显示以下信息提示: 编译了项目 <“{0}” V{1}>。结果见文件树。
库卡机器人控制系统上的项目可以被钉住。 项目可直接在机器人控制系统上被钉 住,或从 WorkVisual 钉住。 被钉住的项目可被更改、激活或删除。 然而也可被拷贝或松开。 您可将项目 钉住,以避免被无意中删除。
操作步骤:
从 WorkVisual 钉住: 1. 选择菜单序列文件 > 查找项目。 项目资源管理器随即打开。 左侧选出了 选项卡查找。 2. 在可用的单元区域展开所需单元的节点。 该单元的所有机器人控制系统均 显示出来。3. 展开所需机器人控制系统的节点。 显示所有项目。 被钉住的项目以大头针 图标标示。 4. 选定所需项目,并点击按键钉住项目。 项目就此钉住(固定),在项目列 表中用一个大头针图标标示。
将机器人控制系统配给实际应用的机器人控制系统
说明
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人 控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统 中。
前提条件
在 WorkVisual 中已添加了一个机器人控制系统。
与实际应用的机器人控制系统的网络连接
实际应用的机器人控制系统和 KUKA smartHMI 已启动。 如果随后要传输并且也要激活项目: 在实际应用的机器人控制系统中已选择了专家或更高的用户组。 限制:如果激活会造成在与安全相关的通讯参数范围内的变化,则必须选 择安全维护人员或更高用户组。
如果在实际应用的机器人控制系统中已选择了运行方式 AUT 或 AUT EXT:项目仅包含对 KRL 程序起作用的设置。如果项目中含有会造成 其它变化的设置,则不能将其激活。
操作步骤 :
1. 在菜单栏中点击按钮安装...。窗口 WorkVisual 项目传输自动打开。在
左侧显示项目中的虚拟机器人控制系统。在右侧显示目标控制系统。如果
尚未选择控制系统,则控制系统是灰色的。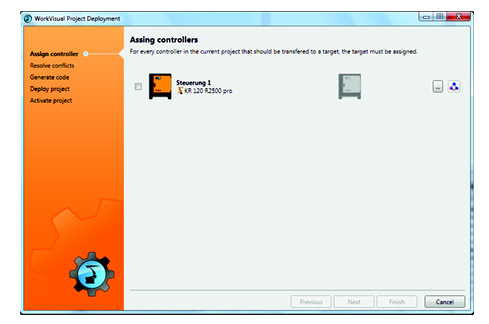
2. 在左侧通过复选框激活虚拟单元。现在必须给该单元分配一个实际应用的 机器人控制系统。
3. 点击按钮…。一个窗口自动打开。筛选器已自动设置,使得只显示与虚拟 控制系统具有相同类型和版本的控制系统。该设置可以更改。
4. 选择所需的实际应用的机器人控制系统并点击 Ok。实际应用的机器人控 制系统即配给了虚拟机器人控制系统。实际应用的机器人控制系统在分配 后显示为彩色,并显示名称和 IP 地址。
5. 如果项目有多个机器人控制系统,则为其它机器人控制系统重复步骤 3 和 4。
6. 点击继续。即检查分配是否有冲突。如果有冲突,会显示一条信息。冲突 必须解决,否则不能传输项目。如果没有冲突,将自动生成代码。
7. 该项目现在可被传输给机器人控制系统。 项目也可在以后某时进行传输。为此点击退出:分配被保存,窗口 WorkVisual 项目传输自动关闭。
更多资讯:库卡机器人
